1. Définition d'un système asservi
Un système asservi est un système automatique qui ajuste sa sortie pour suivre une consigne donnée, en minimisant l'écart entre la consigne et la sortie grâce à un retour d'information (feedback). Ce principe est utilisé dans de nombreuses applications : contrôle de température, pilotage automatique, robots, etc. Exemple : Régulateur de température
- Consigne : Température souhaitée (par exemple, 22 °C).
- Capteur : Mesure la température actuelle.
- Actionneur : Chauffage ou refroidissement.
- Correcteur : Compare la température mesurée à la consigne et ajuste le chauffage en conséquence.
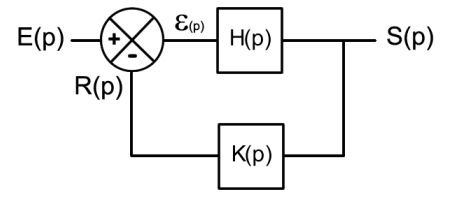
2. Structure générale d’un système asservi
Schéma-bloc général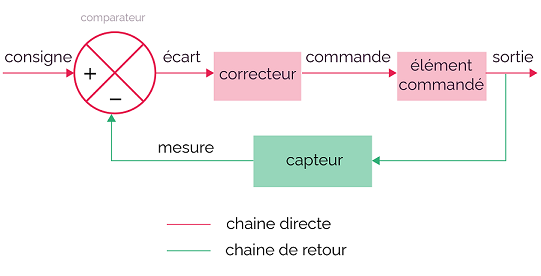
- Consigne (r) : Valeur à atteindre.
- Correcteur : Évalue l'erreur entre la consigne et la sortie.
- Système : Partie physique à contrôler (moteur, chauffage, etc.).
- Capteur : Retour d’information sur l’état du système.
- Sortie (s) : Résultat effectif.
- F(p) est la fonction de transfert.
- S(p) est la transformée de Laplace de la sortie y(t).
- E(p) est la transformée de Laplace de l'entrée r(t).
- p est la variable complexe du domaine de Laplace (p=σ+jω).
3. Types de systèmes
Les systèmes asservis peuvent être classés en ordre 0, ordre 1, ou ordre 2 en fonction de leur comportement dynamique.3.1. Système d'ordre 0 (Gain pur)
Exemple : Amplificateur audio. Fonction de transfert :H(p)=K (gain constant). Réponse à une entrée échelon : Sortie instantanée proportionnelle à l'entrée. Représentation graphique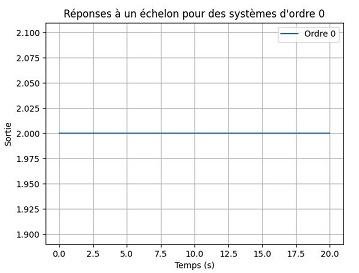
3.2. Système d'ordre 1 (Intégrateur)
Exemple : Chauffage (la température change progressivement). Fonction de transfert : H(p)= K τp+1 τ : Constante de temps (rapidité du système). Cela correspond au temps mis par le système pour atteindre 63% de sa valeur. Réponse à un échelon : Croissance exponentielle vers une valeur finale. Représentation graphique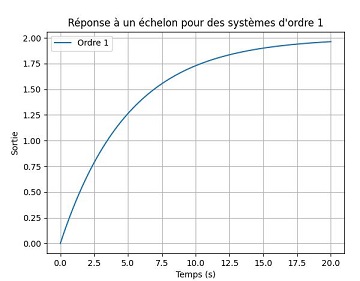
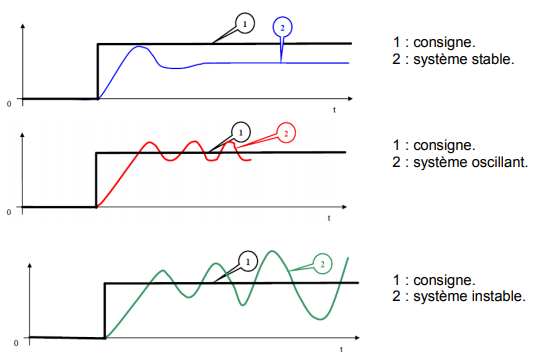
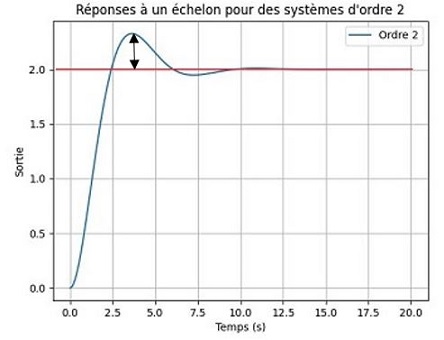
Système d'ordre 2 (Oscillations amorties)
Exemple : Suspension de voiture. Fonction de transfert : H(p)= K τ2p2+2ξτp+1 ξ : Coefficient d’amortissement. Réponse :| ξ<1 : Oscillations amorties. Le système oscille autour de la consigne avec une amplitude qui décroît progressivement. | 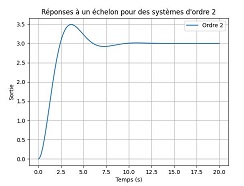
|
| ξ=1 : Amortissement critique. Le système converge vers la consigne sans oscillations, mais le temps de réponse est minimal. | 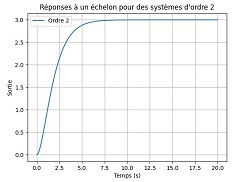
|
| ξ>1 : Système sur-amorti. Le système converge lentement vers la consigne sans oscillations. | 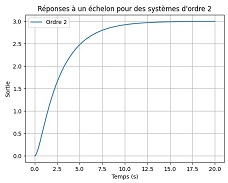
|
| ξ=0 : Oscillations non amorties. Le système oscille indéfiniment autour de la consigne. | 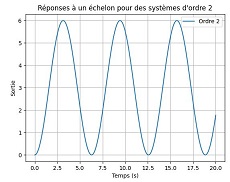
|
ξ≈0.7 : Réponse optimale pour un compromis entre rapidité et dépassement. | 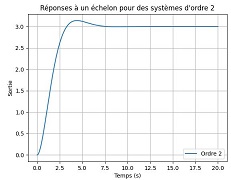
|
Exercice 1 : Identifier des systèmes de différents ordres.
On donne les fonctions de transfert suivantes : Système A :H(p)=3 Système B :H(p)= 4 2p+1 Système C :H(p)= 5 p2+3p+2 1. Identifier l’ordre de chaque système (0, 1 ou 2).
Analyse de la réponse temporelle
4.1. Paramètres caractéristiques
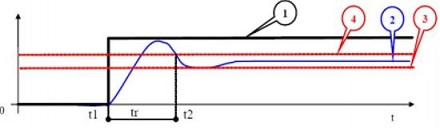
Un système asservi est caractérisé par : La précision: C’est la capacité du système à se rapprocher le plus possible de la valeur de consigne.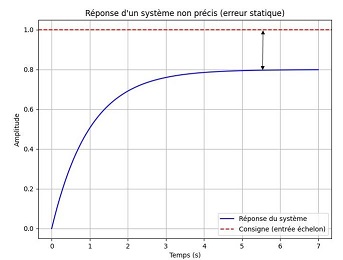
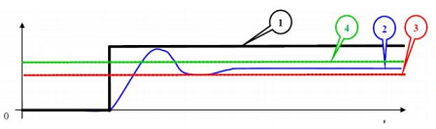
|
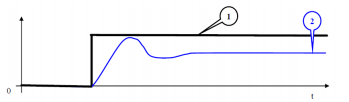
1. Consigne 2. Valeur finale du Système 3. Droite à 95% de la valeur finale 4. Droite à 105% de la valeur finale |
- On trace une droite à 95% de la valeur finale vf (3);
- On trace ensuite une droite à 105% de la valeur finale vf (4).
- On détermine le temps à partir duquel la courbe reste entre ces deux valeurs
2. Les correcteurs
Un correcteur est un algorithme de calcul qui délivre un signal de commande à partir de la différence entre la consigne et la mesure. Le correcteur PID agit de 3 manières :- action Proportionnelle : amélioration de l’erreur statique mais provoque un dépassement plus important
- action Intégrale : lorsque 1 τi est présent l'erreur statique est annulée. Quand il augmente, la valeur finale est plus rapidement atteinte pour les systèmes présentant de grandes marges de stabilité. Le temps d'établissement en régime stationnaire s'allonge pour les autres systèmes qui vont davantage osciller.
- action Dérivée : lorsque τd augmente, le temps de montée diminue (la réponse du système ainsi corrigé est plus rapide) et les dépassements sont mieux amortis. La stabilité est améliorée. N'agit pas sur la précision du système.
Exercice 2 : Ajout d'un correcteur proportionnel
On donne la fonction de transfert suivante : Système B :H(p)= 2 5p+1 1. Identifier l’ordre du système (0, 1 ou 2). 2. Ajouter un correcteur proportionnel de gain K(p)=3 au système. La nouvelle fonction de transfert en boucle ouverte est donnée par :Hc(p) = K(p)*H(p) et simplifier. 3.Quel est l'effet du correcteur proportionnel?
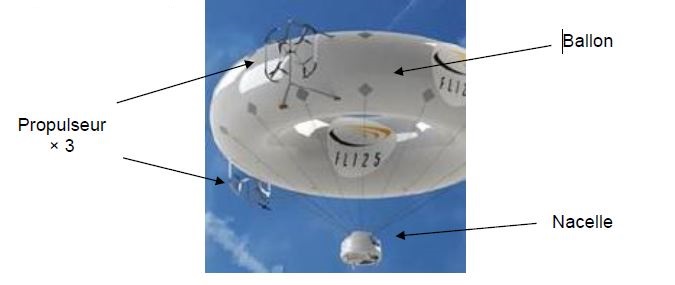
Exercice type bac: Etude d'un quadricoptère
L'Aéronde est un concept innovant qui permet un mode de déplacement aérien
électrique, à faible consommation. Ses fonctions principales sont de
transporter une personne ou du matériel d'un point A à un point B.
L'Aéronde est un dirigeable avec un ballon de forme torique, gonflé
à l'hélium (He) ou au dihydrogène (H2). L'Aéronde suit la même législation que les ULM
car le pilote est embarqué.
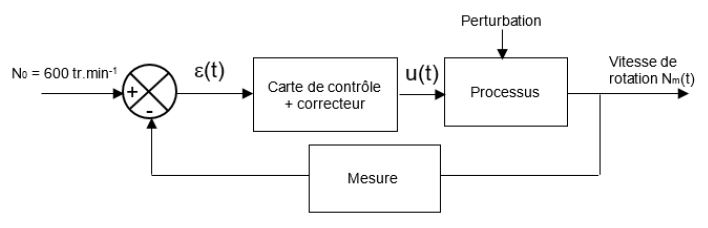
Pour une vitesse de consigne en échelon de 600 tr·min-1, les concepteurs du projet souhaitent une erreur statique nulle et un temps de réponse à 5 % inférieur à 500 ms : ces critères correspondent au cahier des charges de cette partie.
L'objectif de cette partie est de vérifier si l'évolution de la vitesse de rotation du moteur respecte le cahier des charges.

Dans le laboratoire d'une école d'ingénieur de Grenoble, où sont réalisés les essais des propulseurs, un modèle multi-physique permet de commander les moteurs et d'ainsi vérifier la vitesse de déplacement de l'Aéronde. Ce logiciel permet aussi d'avoir l'évolution de la vitesse en temps réel.
L'objectif intermédiaire est d'identifier l'ensemble moteur plus variateur.
La simulation est lancée afin de caractériser le moteur et le relevé obtenu est fourni ci-après.
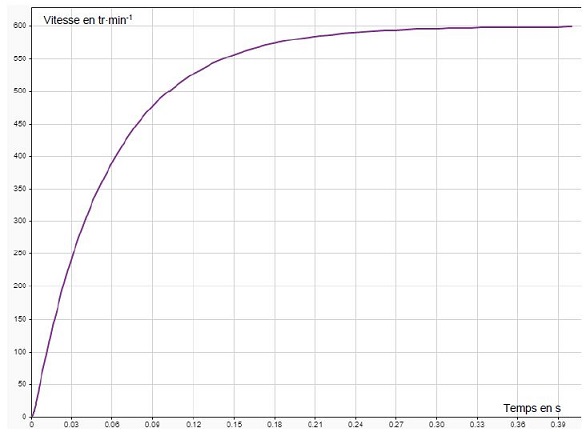
2. Pour obtenir ce relevé, la tension de commande Uc(t) = 40 V a été placée au niveau de l'entrée du modèle, en déduire la valeur du gain G de cette chaîne directe.
Le moteur étant identifié (modèle de comportement), il est décidé d'asservir sa vitesse de rotation. Cet asservissement de vitesse peut se représenter ainsi :
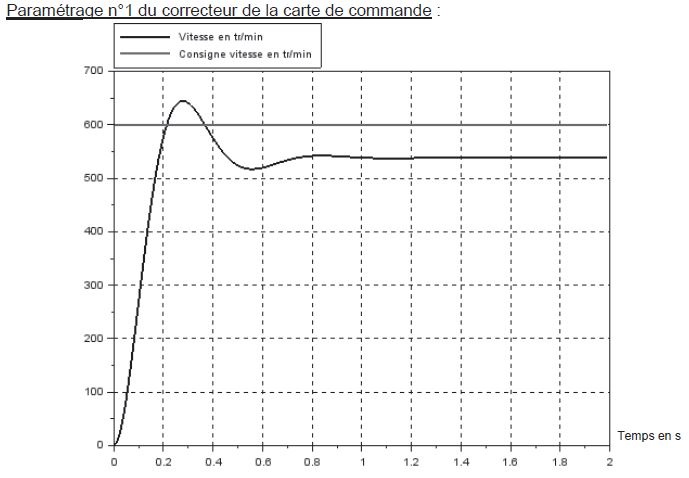
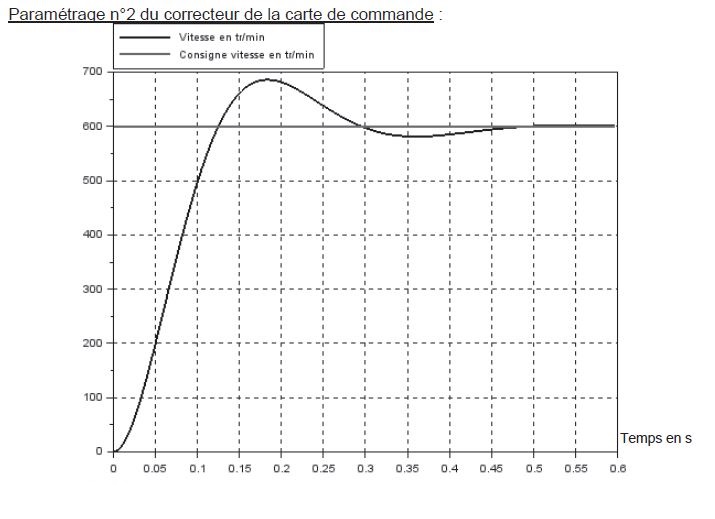
On a donc: G= ΔS ΔE = ΔN ΔU = 600 40 = 15 tr.min-1 3. Pour le premier essai: Sur la courbe, on voit que la valeur finale est environ de 540 tr.min-1. On calcule la valeur à ±5%, soit 1,05*540=567 et 0,95*540=513. On trace la droite correspondantes à ces deux valeurs sur la courbe (zone bleue claire sur la courbe) et on regarde à partir de quand la courbe reste entre ces deux valeurs. Ici, on trouve tr5%= 420ms. Pour le deuxième essai: On effectue la même démarche et on trouve tr5%= 260ms. 4. L'erreur statique est l'écart entre la valeur finale et la consigne. Elle se calcule de la façon suivante: εr= consigne - valeur finale consigne Pour le premier essai: εr= 600-540 600 = 0,1 soit 10% Pour le deuxième essai: Pour le deuxième essai, on remarque le la valeur finale est à la consigne donc l'erreur statique est nulle. 5. Les contraintes imposées par le cahier des charges est un temps de réponse à 5% tr5% <500 ms et une erreur statique nulle. Le deuxième essai répond le mieux au cahier des charges avec un tr5%=260ms et une erreur statique nulle.